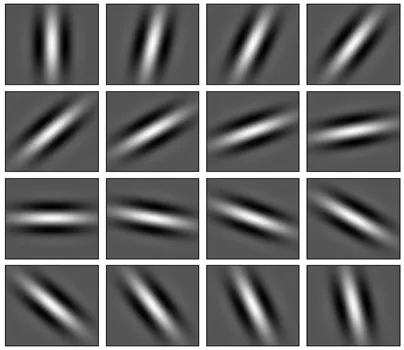
This work explores the application of Gabor filters in the first convolutional layer of con volutional neural networks (CNNs) to improve feature extraction and representation for vision based tasks.

This project proposes a computer vision (CV) based model aimed at streamlining trajectory calculation through simple input images.
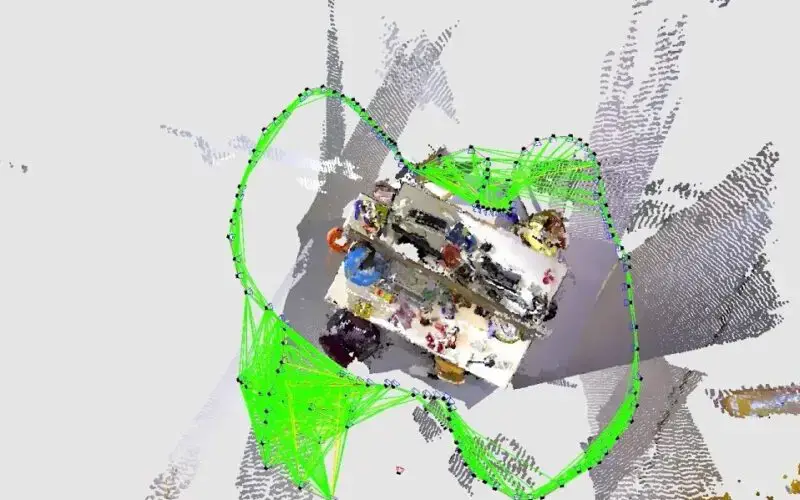
In this project, different LiDAR and visual SLAM algorithms were explored, including Hector SLAM, Gmapping, Cartographer, RTAB-Map, and ORB-SLAM 3, with the goal of creating a map or trajectory of a round-trip route.

This project focuses on enhancing the navigation experience for the blind by leveraging the power of CNNs for object detection. This project uses computer vision and machine learning to provide visually impaired individuals with real-time object and sign detection and recognition.

An autonomous system is developed on the robot under ROS and Ubuntu environments. The objective of the autonomous system is performing reconnaissance to assist emergency workers by creating a map of an unknown area and detecting all necessary figures in it.

This was started as an R & D Project. It is aimed at industries where, whenever an object comes into the workspace of the arm, it will pick up using concepts of Inverse Kinematics and Computer Vision. ROS was used as the main firmware of the system

The theme was to build two arrow-throwing robots that could hurl arrows into pots and defend against opponents while completing other tasks like picking and placing. ROS was used to program the robots, and sensor fusion principles ensured smooth interaction and maneuvering.

To make a robot that replicates the flight pattern of a bird, that can be used for surveillance in areas out of normal reach, replacing the traditional UAVs (unmanned aerial vehicles)

Two robots one completely Autonomous and one Semi-autonomous was made to play rugby, avoiding the obstacles and performing according to the rule book provided.

If you are going to use a passage of Lorem Ipsum, you need to be sure there isn't anything embarrassing hidden in the middle of text. All the Lorem Ipsum generatorsIf you are

Two robots one 4 wheeled completely Autonomous bot and one Semi-autonomous 4-legged robot (mimic horse) was made, avoiding the obstacles and performing according to the rule book provided

PID-based Omni-directional robot using four mecanum wheel configurations